 我问答网
我问答网安全,到底靠不靠谱?
上周我坐了一辆 Robotaxi,说实话——那个刹车,突兀得让我差点把早饭吐出来。后来跟工程师聊,他说其实传感器早在 200 米外就看见那个横穿马路的塑料袋了,但算法犹豫了 0.3 秒,最后还是决定刹。宁可保守,不可冒险,这是写在代码里的铁律。不过话说回来,真碰上那种突然从车缝里窜出来的小孩,机器反应确实比人快,而且不会走神、不会疲劳、不会赌气。可要让我完全把命交给它?一想到有次试乘时中控屏上闪过的那些五颜六色的点云图——激光雷达把被风吹动的树叶误认成障碍物,车子在空荡荡的路上猛打一把方向……我还是后背发凉。
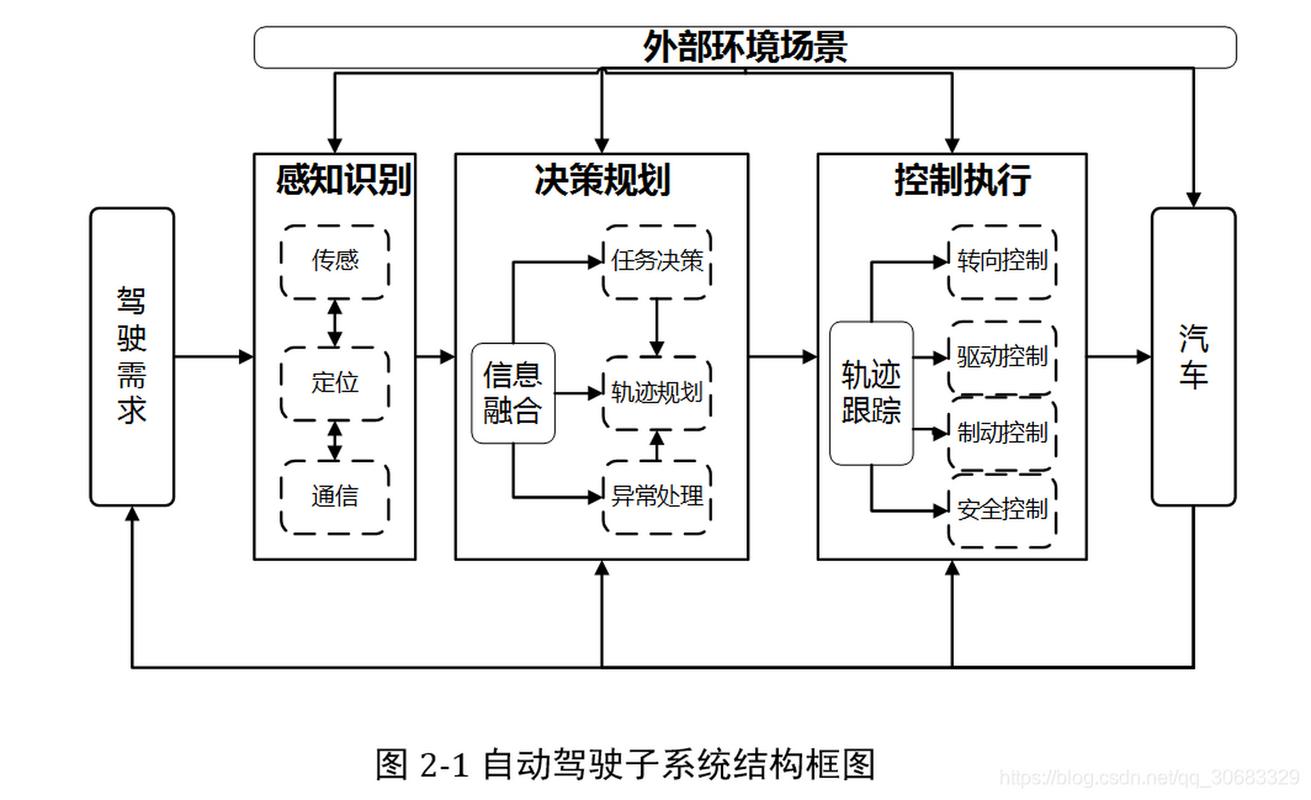
很多人以为无人驾驶车就是长了眼睛的电脑,其实它更像一个超级偏执的仓鼠,时刻在囤积环境信息。激光雷达、毫米波雷达、摄像头、超声波传感器、高精地图、V2X 通讯……数据多到可怕,每秒几 GB 地往里灌。但问题也在这儿:融合的时候,万一有个传感器抽风呢?下雨天,摄像头被泥糊住;逆光的时候,算法把大卡车的阴影当成实体。特斯拉坚持纯视觉方案,马斯克说激光雷达是拐杖,可纯视觉的深度估计到现在还会把白色货车顶当成天空——当年那起致命事故,不就是这么来的吗?
那些事故,怎么就发生了?
2018 年 Uber 那起事故,调查了整整一年多。你猜最后结论是什么?不仅仅是技术失效,更是人祸。安全驾驶员在车里刷手机看视频,系统检测到行人的时候只剩 1.3 秒,紧急制动还被系统逻辑禁止了——因为当时车速有波动,系统怕误触发影响体验,干脆把刹车决策甩给了人类。荒唐吧?但细想想,这种「责任转移」的模糊地带,恰恰是当前最危险的地方。L4 级别的车经常在遇到复杂状况时突然退出自动驾驶,把方向盘丢还给一脸懵的驾驶员,美其名曰“fallback”,可那几秒钟的空白,比醉酒驾驶还恐怖。
还有特斯拉 Autopilot,知乎上吵翻天了。粉丝说它救了无数条命,黑粉说它就是个车道保持加自适应巡航的缝合怪。我的看法?AP 确实在封闭道路很香,但它给了司机一种虚假的安全感。你能想象么,2021 年加州有个哥们儿开着 AP 直接撞上翻倒在路中间的货车,事后调查发现,系统根本没把那辆惨白的事故车识别成一个完整目标。毫米波雷达测到了,可视觉模块说“这团返回信号一定是天桥”,于是整个系统静默了,连 AEB 都没触发。这背后的逻辑冲突,现在还没解决干净。
我们离真正的无人还有多远?
每次看车厂宣传的 L5 概念视频,我都有种看《星球大战》的感觉——酷炫,但跟今天马路上的现实隔了光年。广州南沙的 Robotaxi 运营区,地图更新得比我家楼下的煎饼摊还勤快,可一旦出了高精地图覆盖区,车立马「双眼一黑」,颤颤巍巍地靠边停车。Waymo 在凤凰城跑了上千万英里,事故率确实低,可那是建立在「地理围栏+潮汐调度+远程安全员随时接管」的三重保险上。如果把同样的系统扔到越南河内的摩托车洪流里,我赌它活不过三秒。
不过话说回来,技术迭代的速度也是真快。今年看到几家中国公司搞的端到端大模型,直接从传感器信号到方向盘转角,中间没有任何人类定义的规则。车子在乡村土路上自己学会了会车——先往右让出半个身位,等对面车过去,再从容回到车道中央。就那一刻,我承认我有点兴奋了,像当年第一次用 iPhone 滑动解锁一样,觉得新的时代在敲门。但兴奋没过三秒,我又刷到新闻:一辆「无图智驾」测试车在路口跟企图加塞的人类司机僵持了整整两分钟,最后被后车狂按喇叭,灰溜溜地退出了自动驾驶……

所以,回到最初那个问题:无人驾驶汽车真的安全吗?我的答案大概是——在它设计的那个小世界里,它比人安全得多;可一旦那个小世界的边界模糊了,它比新手司机还要脆弱。而我们最怕的,恰恰是另一种危险:当我们习惯了它的安全,就在某个毫无防备的瞬间,被系统的极限状态迎面击倒。这种「安全错觉」,可能才是无人驾驶时代最大的幽灵。