 我问答网
我问答网先别听厂家吹。自己坐进去那一刻,腿是软的。真的。上次试一台L4的无人车,手搭在方向盘上——虽然没动——但后背全是汗。车突然停在路口,我以为是故障,结果是人行道上有个塑料袋飘过。它怕了。而我,更怕。🚗💨
1. 感知层:激光雷达、摄像头、毫米波雷达,它们怎么配合?
说实话,这堆传感器我原来也搞混。激光雷达发出去几百万个点,画出一张三维点云图,就像给周围环境拍了张X光。摄像头看颜色、看标识、看行人手势。毫米波雷达专测速度和距离,大雾天也不慌。三者数据灌进一个叫「融合模块」的黑盒里,吵完架统一意见——它看到的世界,比人类眼睛丰富十倍不假,但也是场数据内讧。

不过话说回来,传感器堆得再猛,也怕大逆光。有次傍晚,太阳直射摄像头,它把一辆白色SUV当成云朵,差点没减速。工程师说这叫「白化漏检」,补了N个补丁。我心想:真要命,就这儿?❗
感知不止是看,还得猜。 一个骑自行车的人歪了下头,车就得预判他要拐弯。这种预测算法动用了RNN、Transformer,把时间序列卷进去——可它猜错的代价,往往就是一脚急刹,或者更糟,该刹没刹。
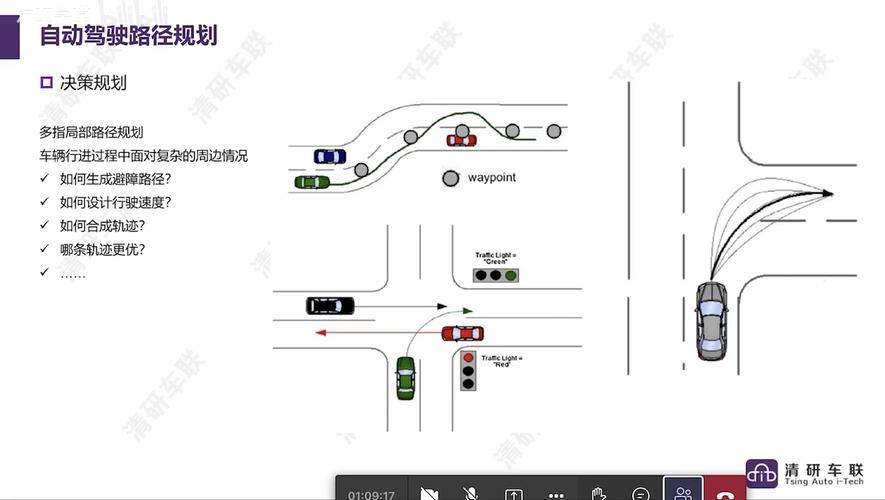
2. 决策与规划:车「脑子」里在想什么?
有个冷知识:无人车每秒钟要做上千个微小决策。它得回答:哪条车道安全?前车会不会突然并线?那个横穿马路的大妈到底是真走假走?而这些,全都压缩在一个叫「cost function」的公式里,谁的风险值低,就选谁。听起来冷酷,但有时候,它比我果断。
可我遇到过傻眼的状况——丁字路口没有红绿灯,左边来车、右边吃瓜群众、正前方还有个逆行的快递三轮。它的屏幕疯狂闪动,路径规划像得了帕金森,最后干脆停下,闪双闪。那一刻,我真想摇下车窗骂街。😂 后来技术员说这是「不确定性区域」触发安全停车,是进步。我想,好吧,进步得让人心肌梗塞。
决策的瓶颈啊,不在算法,在常识。 人类知道交警手势的暧昧含义,知道对方司机眼神里的「让你先走」。车不懂。它只会读取标记过的数据集,但凡遇见没见过的新奇玩意儿——比如一辆拖车上还驮着另一辆车——直接懵圈。这也就是为啥无人车在固定园区溜得飞起,一到城乡结合部就露怯。
3. 那些惊险瞬间:现实比他妈的理论骨感多了
别信演示视频。他们挑晴天的。我亲眼见过暴雨中,一辆无人出租把积水反光认作实体障碍,一个急刹后座咖啡全泼了。还有人往车盖扔香蕉,感知系统报出个「不明小型生物」——你逗我?🍌
更揪心的是边缘场景。比如高速公路上的轮胎残片、突然掉落的树枝。这些物体既不在训练集里,也没有标准形态,车要么视而不见,要么反应过度。有一次我坐的那台,为了躲一只塑料袋,猛打方向切到应急车道,吓出我一身冷汗。虽然后来说系统升级了识别逻辑,但阴影还在。
不过,惊喜也真多。夜间无灯路段,它比我早半秒发现横穿的小动物。变道时后方车辆不让,它能算准时机切进去,比我开得溜。说到底,它是个偏科生,强在重复准确,弱在随机应变。
无人驾驶这条赛道,现在就像刚学会走路的孩子,偶尔摔得鼻青脸肿,可跑起来的姿势已经让老司机咋舌。我不迷信它,但也不会赌它失败——毕竟,谁还没踩过几个急刹车呢。